
ABB dual-arm
On Sale
$8.99
$8.99
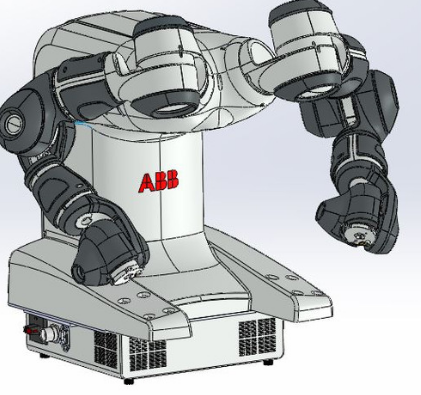
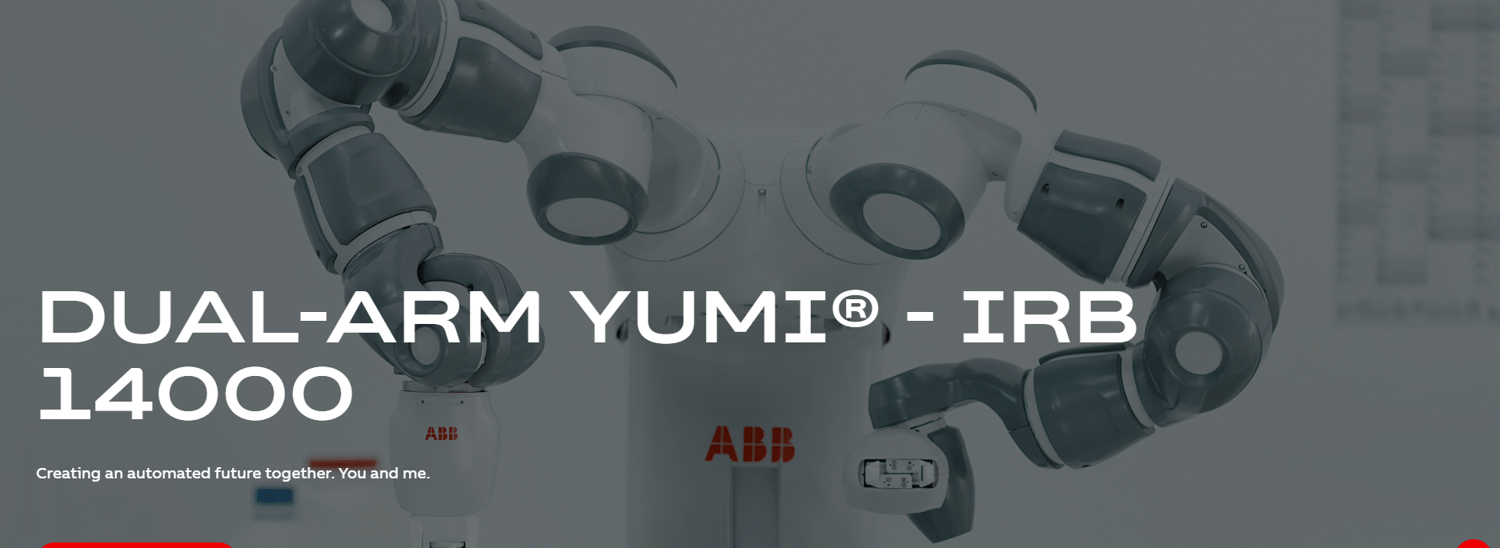
This SolidWorks project represents an ABB dual-arm collaborative robot system designed for precise and coordinated manipulation tasks. It includes part files (.SLDPRT) such as dual articulated arms, base structure, joints, and end-effectors.
All components are organized into assembly files (.SLDASM), forming a synchronized multi-arm robotic system with high precision, flexibility, and suitability for industrial and collaborative applications.