
Industrial robotic manipulator model
On Sale
$7.99
$7.99
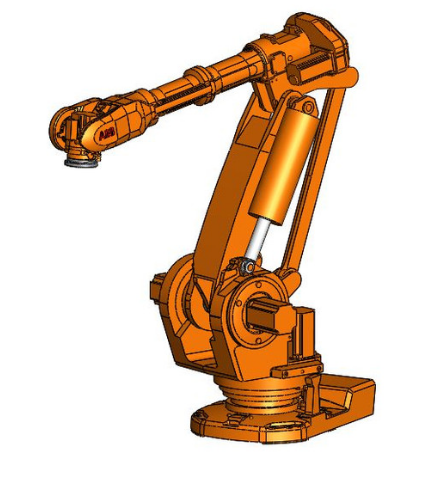
This SolidWorks project represents an industrial robotic manipulator model, designed as a high-payload articulated arm. It includes part files (.SLDPRT) such as the base, shoulder, elbow, wrist joints, and link structures.
All components are organized into assembly files (.SLDASM), forming a multi-degree-of-freedom robotic system suitable for industrial simulation, motion analysis, and integration with automation workflows.