
Robotic end effector
On Sale
$3.99
$3.99
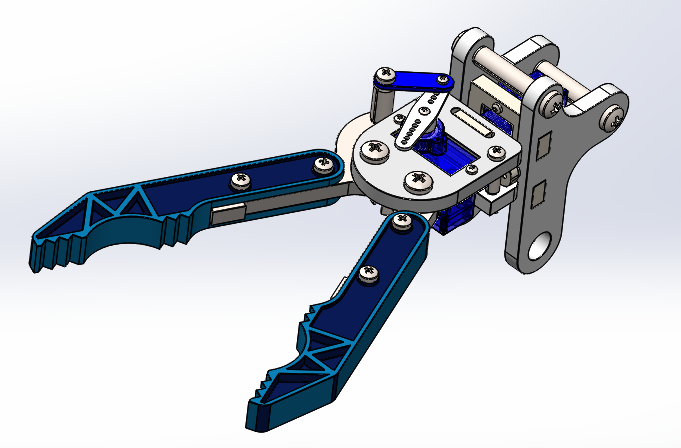
This SolidWorks project represents a robotic end effector, specifically an impactive two-finger gripper designed for object grasping. It includes part files (.SLDPRT) for the gripper structure and simplified servo motor components used for actuation and simulation.
All components are organized into assembly files (.SLDASM), forming a functional gripping mechanism. Additional neutral CAD files are provided to ensure compatibility across different CAD platforms and SolidWorks versions.