


Robot Manipulators, Control Systems, and Base Systems
Abstract
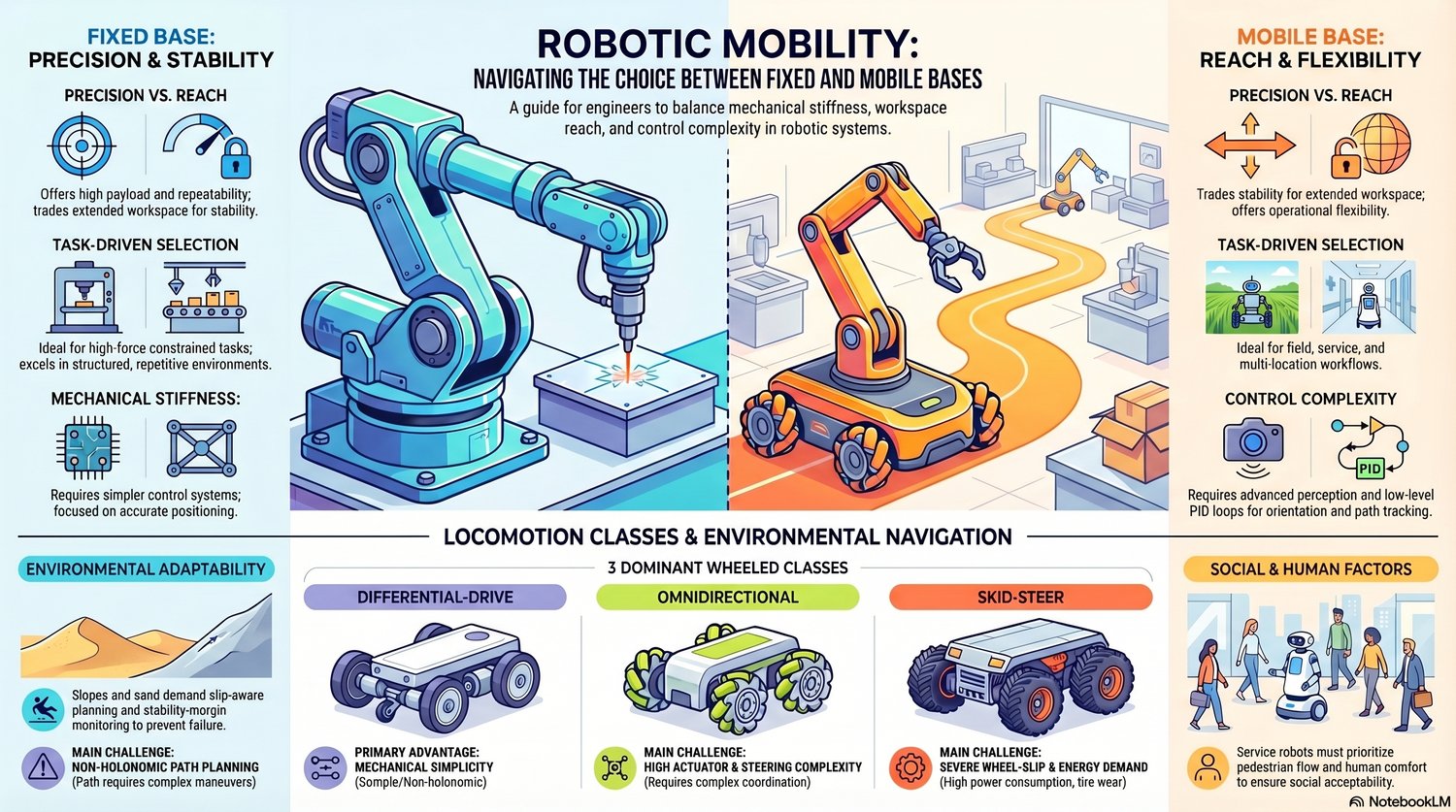
This review synthesises design and control considerations for robot manipulators and mobile bases, linking mechanical architectures, actuation choices, transmission topologies, sensing, and control methods to application requirements. It analyses serial and parallel manipulator trade-offs, joint and DOF selection including continuum and flexible joints, and material and modal effects on stiffness and vibration. The survey compares electric, hydraulic, pneumatic and soft actuators and documents how transmission choices, such as gears, belts, cables and time‑sharing drives, shape compliance and resonance. Control discussions span classical PID and LQR, robust nonlinear methods including sliding modes and ADRC, model predictive and optimal/adaptive schemes, and learning‑based approaches that augment safety via hierarchical or hybrid loops. State estimation and sensor fusion, from Kalman variants to ESOs and sequential fusion, receive emphasis as enablers of high‑performance closed‑loop behaviour. Representative experiments illustrate practical gains: extended flexible‑joint modelling reduced pose errors substantially, dual‑drive time‑sharing exoskeletons lowered metabolic cost in wearer trials, and SHAP‑informed data‑driven diagnostics improved fault classification. The review concludes that co‑design of mechanics, transmission and control, together with robust sensing and data‑driven diagnostics, tends to produce the most effective deployed systems.
Keywords: robot manipulator, actuation, power transmission, control architectures, state estimation, mobile base, human-robot interaction
The content is generated using #softwaretheses which is created by the author himself and his brother. Made in Malaysia. There are 63 references taken from reliable sources