A Step-by-step Complete Guide to Build a Drone from Scratch using the Ardupilot APM Navio 2 Flight Controller
By
BC
Ardupilot is a widely used open source unmanned vehicle autopilot software that is capable of performing many functions. Documentations and various sources have provided us with the basic knowledge of the setups and use each separate component of a drone but none has provided a detailed guide on how to put them together to build the drone’s hardware with guided steps of component setup and assembly from scratch, together with all necessary configuration and setups.
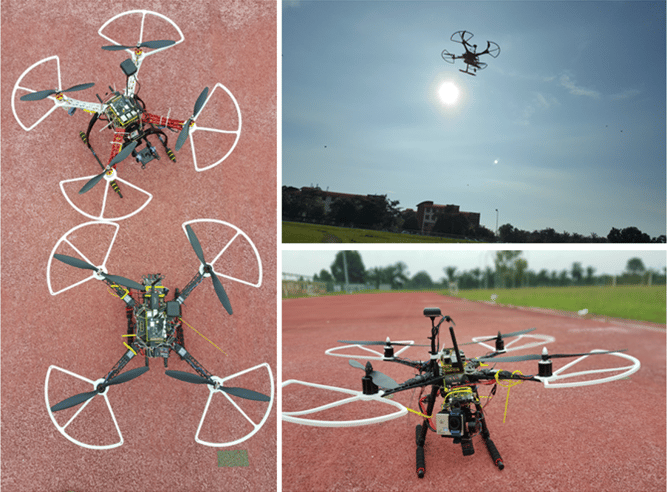
This article is written to combine all scattered information into one piece, to provide a step-by-step guidance from head to tail of how to build and assemble a quadcopter from scratch and how to perform all setup configurations required using the Navio2 Ardupilot flight controller. Other flight controllers from APM or others can also partly rely on this guide.
This article is written to combine all scattered information into one piece, to provide a step-by-step guidance from head to tail of how to build and assemble a quadcopter from scratch and how to perform all setup configurations required using the Navio2 Ardupilot flight controller. Other flight controllers from APM or others can also partly rely on this guide.

