
As documented in the How-to guides for ROS2 Humble
ROS 2 is supported on both 32 bit (arm32) and 64 bit (arm64) ARM processors. However, you can see here that arm64 receives Tier 1 support, while arm32 is Tier 3. Tier 1 support means distribution specific packages and binary archives are available, while Tier 3 requires the user to compile ROS 2 from source.
For ROS2 on the 32-bit only Raspberry Pi, like Raspberry Pi 2, you have to build it yourself from the source for several days.
With pre-build ROS2 Humble, you can reduce your unnecessary effort to build yourself.
Requirement
- Raspberry Pi
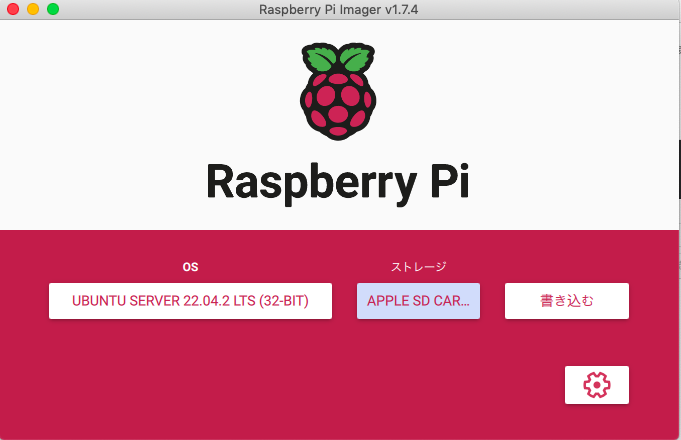
- 32GByte or larger micro SD-CARD wrote Ubuntu Server 22.04.2 LST(32-bit)
You can write this by Raspberry Pi Imager as the following choice:

Step 1: Expand the downloaded ros2_humble.tar.gz file on your Raspberry Pi
Expand this file as follows:
time tar xvzf ros2_humble.tar.gz
It might take slightly a long time.

Step 2: Carry out the necessary steps on the official document for building.
- Set locale
- Add the ROS 2 apt repository
- Install development tools and ROS tools (chose the step for "Ubuntu 22.04 LTS and later")
Step 3: Set up rosdep.
Move into ros2_humble as follow:
cd ros2_humble
Then carry out the steps of Install dependencies using rosdep.
That's it! to confirm to the environment is set up well, Try some examples. Enjoy!
Step 4: Source Humble setup file in your .bashrc
Add the following lines at the end of your .bashrc file.
# enable ROS2 Humble
if [ -f ~/ros2_humble/install/local_setup.bash ]; then
. ~/ros2_humble/install/local_setup.bash
fi
How to use graphical tools on the headless Ubuntu?
Because you are working on the Ubuntu server which is headless, you may wonder how to use graphical tools. Please refer to the post How to use graphical tools on the headless Ubuntu?
You can find the best way for you.